Shut-off for F2D-Combat
"Robot" - the F2D autopilot
|
Last update: 7/2 2010 If you do not have a wind tunnel for testing engines and propellers you have to take your models for a series of test flights. To eliminate the influence from the pilot it would be nice to have an autopilot to fly the model. This is our first experiment with a simple system. |
 ROBOT - combat autopilot |
|
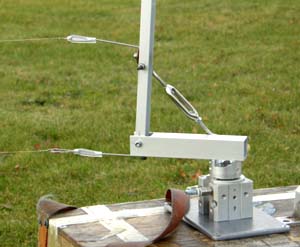
 The "auto pilot" mounted on top of a toolbox  Close-up off the auto pilot. The distance between the lines are here 100 mm  Henning Forbech attaching the lines to the auto pilot  Checking the ruder. Normal flying height is set to 2.5-3 m  Preparing the model and the cameras. Cam-1 on the tripod, Cam-2 in the grass behind the mechanic and Cam-3 at the handle.  Cam-3 on the ground and Cam-4 (Bjarne Schou).  Typical landing. Note the very small elevator! |
||
|
|
||
--= Back 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 Next =--
Shut-off start - F2D.dk